Arduino IDE 中有一些示例代码可以作为学习参考
【《别再找了!这是有史以来最棒的Arduino教程系列》感谢佑來老师的奉献无私!】
01 点灯
相关设备:ArduinoUno开发板、数据线(D口)、电脑void setup(){}表示初始化函数,void loop(){}表示循环函数,setup()函数只会在程序开始运行时执行一次,loop()函数会一直循环执行。
1 | void setup(){ |
02 点灯 加强版
相关设备:面包板、电阻、杜邦线(两头针)、红绿LED灯开发板上有数字的针脚,都是正极。GND针脚是负极。LED灯是电阻很小的元器件,需要串联一个电阻。否则过大的电流会烧坏LED灯(或烧坏开发板)。
1 | void setup(){ |
03 按钮
相关设备:按钮按钮不是通常的通断概念,应该用‘信号’的概念理解若使用数字信号针脚读取变换,就在有信号(电压等)变换的地方接入读取(上拉、下拉的概念)if(){}表示判断,==表示判断是否相等
1 | int buttonState = 0; |
04 串口输出
/* */、//表示注释,注释的内容不会被编译,不会被执行。println()与print()的区别是,println()会换行,print()不会换行。
1 |
|
05 按钮防抖
按钮在按下时,可能会出现“弹跳”,即不是理想状态下的信号变为5v,而是会在5v与0v之间弹跳几下。最后才稳定到5v。
防抖即在按下时就记录,之后一段时间内不在相应(设置delay)。如上例
06 模拟信号输入
相关设备:potentiometer(电位器),最小0 , 最大1023。
1 | int sensor = A0; // 设定sensor变量指向A0引脚 |
07 舵机
相关设备:舵机。舵机可以转动指定的角度。舵机信号线必须接到PWM引脚
1 |
|
08、09 74HC595 芯片
相关设备:74HC595。
- 74HC595是一个8位串行输入、并行输出的位移缓存器
- 此芯片可以帮助你高效率地扩充引脚。
- 芯片缺角半圆表示引脚计数起始处。
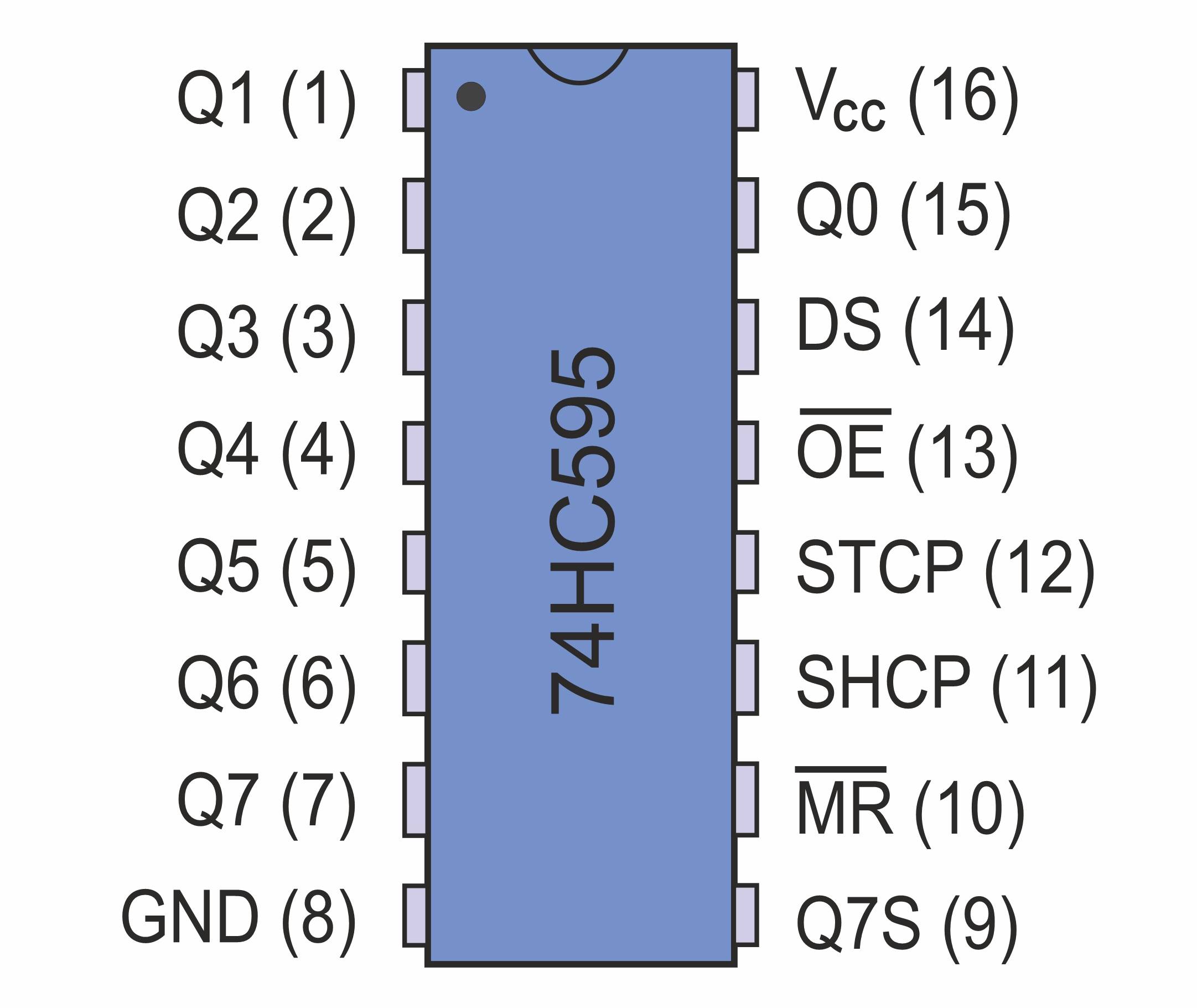
- Q0~Q7为输出引脚,DS“数据输入引脚”,OE“接地”,STCP“时钟引脚”(大平台),SHCP“时钟引脚”(活塞),MR“复位引脚”。
- 工作逻辑(形象比喻):活塞将8个数据依次“推”进低电平的“大平台”,“大平台”再将数据输出到每一个Q引脚。

1 |
|
10 步进电机
相关设备:步进电机、ULN2003芯片。
| 舵机 | 步进电机 | |
|---|---|---|
| 转动 | 转到指定角度 | 转指定角度 |
| 线数 | 3条 | 4-6条 |
步进电机原理:步进电机的转动,是通过控制4个引脚的电平状态实现的。即4个引脚轮流接地、断开电平,使得其对应线圈产生磁场后转动转子。
ULN2003芯片原理:1-7引脚高电平,则对面的对应引脚(16-10)输出低电平。8号引脚为接地。
1 |
|
11 8x8 点阵LED面板
相关设备:8x8 LED面板。
点亮点阵的某个点,即使得对应行高电平(5v)、列低电平(GND)。
让点阵列输入高电平,则该列“断路”
1 |
|
12、13 WiFi 连接
可能是最常用的WiFi模块。也可独立作为微控制器使用。
相关设备:WiFi模块 ESP8266
将板子连接电脑后,在Arduino IDE中,选择NodeMCU (ESP-12E Module)
1 | /* |
14 红外遥控
相关设备:Arduino Nano、红外遥控器、红外接收器。(任何的家用遥控器都可以拿来用)
基本逻辑:遥控器发送信号,接收器接收信号,Arduino Nano通过引脚控制引脚的高低电平。
红外接收器的引脚:信号线、GDN、5V
1 |
|
15 ATtiny85
最小化的arduino 。可将arduino UNO程序烧录到ATtiny85,实现一些简单的功能。
三色LED,最长的引脚为GND,其余为RGB。
